Im F&E-Projekt MAUAV (Mission Adaptable Unmanned Aerial Vehicle) wird ein querschnittlich nutzbares Drohnen-Trägersystem entwickelt, das aufgrund der konsequent modularen Bauweise, der Nutzung vorhandener Techniken und Komponenten, als auch durch die Implementierung innovativer Funktionalitäten und der Real-Time-3D-Visualisierung nicht nur neuesten Anforderungen genügt, sondern auch einfach an unterschiedliche Missionen, Rollen und neue Techniken anpassbar ist.
Die Module Sensorik, Kommunikation, Rumpf, Flügel und Antrieb sind über Standardschnittstellen einfach austauschbar und genügen somit exakt den Anforderungen einer gegebenen Mission als auch Anforderungen zur Mehrrollenfähigkeit. Die zugehörige Systemsoftware ist gleichermassen strukturiert, so das jeweils nur die zugehörige Software-Komponente ausgetauscht bzw. aktiviert werden muss. Einfache Anpassungen an den Stand der Technik, z.B. zur Implementierung neuer Sensortechnologie, zum Einsatz als Relaisstation, zur Integration des Flugkörpers in ein Kommunikationsnetzwerk etc., bedingen ebenfalls nur den Austausch bzw. die Änderung der entsprechenden Hard- und/oder Software-Komponente.
Zusammengefasst besitzt MAUAV folgende Merkmale:
- Trägersystem für eine Drohne mittlerer Reichweite (bis 500km)
- Konsequent modularisiert und auf Standards aufbauend
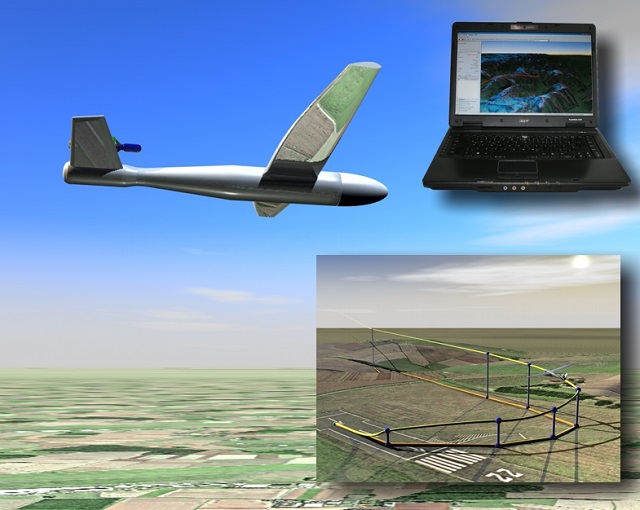
- Echtzeit 3D-Visualisierung von Missionen einschließlich Einblendungen von zeitsynchronen Videodaten und Signalen externer Quellen
- Einfach an neue Anforderungen, Missionen und/oder Technologien anpassbar
- Konfigurierbare Teilsysteme
- Tragflächen mit deren Spannweite & Profil
- Triebwerk (Propeller oder Turbine)
- Sensorik
- Komponenten für die Kommunikation und die Navigation
- Landung (mit Schirm oder konventionell über Spoiler)
- Mehrrollenfähigkeit (nur jeweils Austausch der relevanten SW- und/oder HW-Komponente)
- Systempreis ca. 1/10 gegenüber vergleichbarer Systeme
Download der Datei:
TROUT_Teaser_MAUAV_De.pdf
Durch zusätzlich implementierte Features, wie z.B. der „Sägezahnflug“ zur Verlängerung der Reichweite und/oder Missionszeit, durch den Einsatz neuester Verbundbaustoffe als auch durch die Integration nutzbarer COTS ( commercial off-the-shelf) Komponenten ergeben sich neben den vorgenanten Vorteilen auch Vorteile im Systempreis, der bei ca. 1/10 vergleichbarer Systemen eingeschätzt wird.
Im Rahmen der Integration von COTS-Komponenten zur Software wurden die nutzbaren Teile unserer Kommunikations- und 3D-Visualisierungssoftware aus der Luft und Raumfahrt angepasst und implementiert. Diese stellen mit ihrem hohen innovativen Anspruch, mit der hohen Qualität und Funktionalität, ein weiteres Herausstellungsmerkmal des Projektes dar.
Über die fotorealistische Real-Time-3D-Visualisierung wird die Missionsplanung in 2D als auch in 3D unterstützt. Hierbei kann Planungs- und Simulationsmodus die Mission geplant und über die Simulation visualisiert werden. Analysewerkzeuge (was wäre wenn?) unterstützen hier in der Optimierung als auch in der realistische Ausbildung. Im Lademodus werden alle Daten geprüft, MAUAV in seinen optimalen Komponenten vorgeschlagen und die Daten für die konkrete Mission zum Transfer in den Operationsspeicher des Flugkörpers zur Verfügung gestellt.
Im Kontroll-Modus erfolgt die Kontrolle der Mission über die laufende Anzeige und Prüfung relevanter Daten als auch über die 3D-Visualisierung. Hierbei ist eine freie Kameraposition für den Beobachter wählbar. Landkarten beliebiger Formate können hinterlegt werden.
Die Graphiken zeigen eine Auswahl der Designstudien für MAUAV, beispielhaft für die konzipierten Antriebe (Propeller/Strahltriebwerk).
Links
Fischer, H. and Völkel, A. (2010): Gedanken zu einem Paradigmenwechsel in der Entwicklung und im Einsatz von Drohnen (UAVs) In: zugleich – Zeitschrift der Artelleriegruppe, Sonderheft STF (2010), pp. 33-36.

